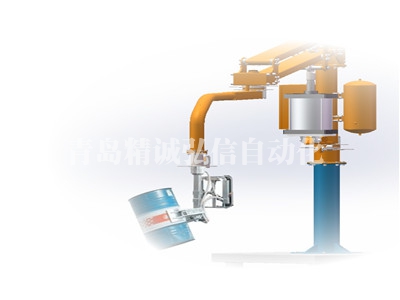
助力機械手�,又稱機械手、平衡吊��、平衡助力器��、手動移載機(以上說法并不專業(yè)但國內(nèi)已經(jīng)流行)�,是一種新穎的、用于物料搬運及安裝時省力操作的助力設(shè)備�。它巧妙地應(yīng)用力的平衡原理,使操作者對重物進行相應(yīng)的推拉���,就可在空間內(nèi)平衡移動定位�。重物在提升或下降時形成浮動狀態(tài)�,靠氣路保證零操作力(操作力受工件重量影響,實際情況因加工工藝及設(shè)計成本控制���,操作力以小于3kg為判斷標準)���。無需重體力熟練工人操作�����,任意操作者用手推拉重物����,就可以把重物正確地放到空間中的任何位置并懸停�����。
1���、分類:
助力機械手按不同方式要求有不同的分類����,具體分類如下:
按工作原理不同:分為硬臂式和軟索式兩種����。
按動力源不同:分為氣動式和電動式兩種�。
按基座不同:分為落地固定式����、落地移動式�����、懸掛固定式�、懸掛移動式、附墻式等���。
按抓取方式(即機械手)不同:分為真空吸取式(吸盤式)�����、氣動夾取式(夾持式)����、吊勾式等�����。
2�、結(jié)構(gòu)組成:
一套完整的助力機械手裝備主要由三部分組成:結(jié)構(gòu)主體、控制系統(tǒng)、抓取夾具(或機械手)����。
結(jié)構(gòu)主體是根據(jù)用戶服務(wù)區(qū)、現(xiàn)場狀況及操作要求以支撐整套設(shè)備的機械結(jié)構(gòu)��。
控制系統(tǒng)是保證結(jié)構(gòu)主體正確運行以實現(xiàn)物料(或工件)在空中無重力化浮動狀態(tài)的控制裝置����。
機械手則是實現(xiàn)工件抓取,并完成用戶相應(yīng)搬運和裝配要求的裝置����。
3、應(yīng)用范圍:
助力機械手廣泛應(yīng)用于現(xiàn)代工業(yè)中的物料移載��、高頻率搬運��、精確定位���、部件裝配等場合�����。從接受原材料和物料開始��,一直到加工���、生產(chǎn)、保管及配送等物料流動過程中的每一個環(huán)節(jié)��,助力機械手都可發(fā)揮令人矚目的作用����。
4、主要特點:
助力機械手的主要特點可概括為:三省一安全����。
省時:全程平衡、運動順滑��,使得操作者可以很便捷地實現(xiàn)工件的搬運��、定位�、裝配等
操作,為繁重而復(fù)雜工作節(jié)省了時間�。
省力:多人才能干的工作由一人完成,一人勞累的工作能輕松完成�����,不管婦女還是兒童
都可以隨心所欲的駕馭,大大降低了勞動強度����,從而提高了生產(chǎn)效率,同時也保障了產(chǎn)品品質(zhì)����。
省心:使用助力機械手在各行業(yè)工作中,使重物的移載變得輕而易舉�����,搬運現(xiàn)場操作人
員的健康��、安全得到了保障��,即滿足了用戶的作業(yè)要求又減少了用戶在設(shè)備和人員方面的資
金投入�。
安全:我公司的助力機械手內(nèi)置各種安全裝置。重物在漂浮狀態(tài)下即使操作者誤操作也不會釋放�����,直到重物依托重力后才能釋放�����,突然斷氣時自動啟用安全保壓系統(tǒng)防止手臂的突然下降,可以鎖住三個旋轉(zhuǎn)關(guān)節(jié)���,防止手臂隨意旋轉(zhuǎn)���,自動識別物體的重量�����,只起吊限重范圍內(nèi)的物體�。配有剎車裝置,操作者可在操作過程中隨時中斷機械手的運動���。操作按鈕都集成于機械手控制面板上���,控制器、指示燈����、指示器等按人體學原理布置,便于操作及緊急情況的處理�����。